97/5/20
12:0 ص


معرفی محصولات شرکت پریماتوی
شرکت پریماتوی از سال 1394 فعالیت خود را در زمینه طراحی و ساخت هواپیمای مدل رادیوکنترل و کوادکوپترهای کاستوم و فروش انواع کواد کوپتر ، هواپیما ، هلیکوپتر و ماشین رادیوکنترل آغاز کرده است . پریما (prima ) در زبان ایتالیایی به معنای “اول” میباشد . شرکت پریماتوی با داشتن تیم متخصص همراه با کارشناسان مجرب سعی در ارائه بهترین خدمات به مشتریان خود را دارد .
طراحی ، ساخت و آموزش پرواز انواع هواپیمای مدل و کواد کوپتر
شرکت پریماتوی علاوه بر فروش محصولات اورجینال و برند های معتبر ، برای مشتریان خود محصولات اختصاصی را طراحی می کند و ساخت آنها را بر اساس بودجه مورد نظر و با بالاترین کیفیت انجام می دهد . علاوه بر این شما می توانید آموزش پرواز انواع هواپیماهای مدل و کوادکوپترها را از شرکت پریماتوی دریافت کنید .
واردات جزئی ، فروش و تعمیرات انواع سرگرمی های رادیوکنترل (کوادکوپتر ، ماشین کنترلی ، هواپیما و اسکوتر برقی) ممکن است شما هم جزو افراد علاقه مند به وسایل کنترل از راه دور باشید . شما می توانید بهترین برندهای روز دنیا را با بیشترین تنوع از شرکت پریماتوی بخواهید . همچنین اگر دستگاه های رادیوکنترل شما دچار مشکل شد ، شما می تواند برای تعمیر آنها به بخش فنی و تعمیرات شرکت پریماتوی مراجعه نمایید .
افتخارات کسب شده توسط شرکت پریماتوی
شرکت پریماتوی از سال 1394 شروع به کار کرده است و تاکنون افتخارات بیشماری در زمینه طراحی ، ساخت و اختراع وسایل میکروکنترل کسب کرده است .
از جمله افتخارات شرکت پریماتوی :
کسب مقام اول لیگ ربات های پرنده (کوادکوپتر) در مسابقات بین المللی ایران اپن سال 2012
کسب مقام دوم لیگ ربات های مریخ نورد در مسابقات بین المللی دانشگاه امیرکبیر سال 2010
ثبت اختراع تحت عنوان (هواپیمای بدون سرنشین) در سال 1391 توسط هئیت داوران در همایش حمایت از مبتکرین و مخترعین غرب کشور
عضو کارگروه تخصصی (نرم افزار) در سال 1392 توسط مرکز حمایت از مبتکرین و مخترعین غرب کشور
کوادکوپتر چیست؟
خرید کوادکوپتر ، یا مالتی روتر (چند پروانه)، یا پهباد، یا کوادروتر، یک وسیله مکانیکی پروازی ساده با چهار بازو است، که در هر یک از بازوها موتوری به یک پروانه متصل شده است. مالتی کوپترها با سه، شش یا هشت بازو نیز وجود دارند، اما عمدتا شبیه به کوادکوپتر عمل می کنند. دو پروانه در جهت عقربه های ساعت و دو پروانه دیگر خلاف جهت ساعت می چرخند. کوادکوپترها به لحاظ ایرودینامیکی ناپایدار هستند، و به یک کامپیوتر پرواز نیاز دارند تا فرمان های ورودی را به فرمان هایی تبدیل کنند که RPM های (دور موتور) پروانه ها را تغییر دهند تا حرکت مطلوب و مورد نظر را ایجاد نمایند. این پاراگراف در واقع پاسخی کوتاه به سؤال بالا بود. در ادامه این مقاله اطلاعات بیشتری برای آشنایی شما با دنیای کوادکوپترها ارائه می دهیم.
کوادکوپترها با هلیکوپترها یا هواپیماهای بال ثابت تفاوت دارند چرا که نیروهای بالارونده و کنترلی ایجاد می کنند. چرا که در هواپیما بلند شدن بوسیله بال ها انجام می شود، اما در کوادکوپتر این امر توسط پروانه ها صورت می گیرد. هلیکوپتر از روتر اصلی خود برای بلند شدن استفاده می کند، اما در عین حال می تواند چرخش تیغه های روتر را به منظور ایجاد نیروهای کنترلی تغییر دهد.
ایده کوادکوپتر جدید نیست. طراحی های کوادکوپترهای با سرنشین در دهه 1920 و 1930 ارائه شد، اما این ایده ها دارای عملکردی نامطلوب، و سطح بالایی از ناپایداری بودند، و به حجم بالایی از فرمان های خبان نیاز داشتند. با پیشرفت فناوری الکترونیک در کامپیوترهای کنترل پرواز، موتورهای بدون هسته یا براش لس، میکروپردازشگرهای کوچکتر، باتری ها، دوربین ها، و حتی سیستم های GPS طراحی و پرواز کوادکوپترها امکان پذیر شد. سادگی کوادکوپترها آن را به یک وسیله عکسبرداری هوایی و پلت فرم ویدئویی مؤثر تبدیل کرده است. کوادکوپترها یک شیوه اقتصادی برای معرفی خود به دنیای وسایل هوایی کنترل از را دور هستند. به پرواز درآوردن آن ها جالب است، و با کمی تمرین و صبر هرکسی می تواند یادبگیرد که چگونه یک کوادکوپتر را به پرواز درآورد.
اسکوتر های برقی را بهتر بشناسیم!
اگر شما از نیز مانند افراد متعددی شیفته و مجذوب انواع خرید اسکوتر برقی هستید یا اگر می خواهید یکی از آن ها را خریداری کنید، در این مقاله ما به شما کمک می کنیم تا یکی از بهترین نوع اسکوتر برقی را انتخاب کرده و خریداری نمایید. اسکوتر ها توسط باطری و یا برق شارژ شده و حرکت می کنند. از جمله وسایلی است که امروزه اکثریت از آن برای تفریح استفاده می کنند اسکوتر های برقی هستند. در یک زمان بسیار کوتاه این وسیله فوق العاده مدرن سهمی بسیار بزرگ از بازار را با انواع شبیه به خود مانند دیگر انواع اسکوتر های برقی سگوی یا همان دوچرخه الکتریکی و هاوربورد از آن خود کرده است. این وسیله بسیار سبک و مناسب حمل و نقل می باشد. اسکوتر برقی از جمله وسایل محبوب برای جهانگردان و سایرین می باشد. اسکوتر های برقی در انواع چرخ های تکی و دو چرخی موجود می باشد. امروزه قیمت اسکوتر برقی مانند کلوچه به راحتی در فروشگاه های انلاین و فروشگاه های سراسر دنیا یافت می شود و قابل خریداری است. امروزه در سراسر اینترنت و همچنین در فروشگاه های سراسر دنیا می توانید طیف وسیعی از معامله گران و فروشندگان اسکوترهای برقی را ببینید. این باعث می شود که شما برای انتخاب کمی سردرگم و گیج شوید. اما ما اینجا هستیم تا شما را به بهترین نحو راهنمایی کنیم، ما به شما برخی از بهترین و بی نظیر ترین انواع اسکوتر های برقی را معرفی می کنیم تا انتخاب بهتری در خرید این وسیله داشته باشید.
ماشین کنترلی سرگرمی بزرگسالان
در چند سال اخیر اسباب بازی ها و ابزار سرگرمی بزرگسالان رو به افزایش است. این اسباب بازی ها کمک می کند آرزوها و هیجانات خود را در مقیاس کوچکی تجربه کنید. قیمت این محصولات متنوع است . شما می توانید هر محصولی را با هر اندازه ای از فروشگاه های سراسر دنیا و یا به صورت اینترنتی تهیه نمایید. اما قبل از خرید بایستی اظلاعات کافی راجع به محصول مورد نظر خود را به دست آورید. در این مقاله ما در رابطه با خرید ماشین کنترلی و خصوصیات هر محصول صحبت می کنیم. با دانستن این اطلاعان شما می توانید محصولی متناسب با نیاز ها و علایق خود را با قیمتی فوق العاده ایده آل تهیه نمایید.
علاقه مندان به مسابقات رانندگی و جاده ای با ماشین کنترلی به طور معمول ترجیح می دهند اتومبیل های دقیق با سرعت بالا و قدرت کنترل بالا و پیشرفته و منحصر به فرد خود را داشته باشند. با این وجود رانندگی با این نوع از خودرو ها بسیار سخت می باشد و نیاز به اشنایی و تجربه دارد. با این حال تمام موارد ذکر شده از ویژگی های این ماشین ها است. همان گونه که کودکان در هنگام بازی با ماشین کنترلی؛ کنترل آن برایشان بسیار سخت است و کنترل کردن آن ممکن است برایشان قدری دشوار باشد و ماشین اسباب بازی آن ها باید بسیار مقاوم باشد تا دوام بیاورد. برای ماشین کنترلی بزرگسالان نیز همین امر صادق است شاید مدتی زمان ببرد تا بتوانید به کنترل آن مسلط گردید. شاید این ماشین ها ظاهری شگفت انگیز نداشته باشند اما قدرت بدنه و سرعت و ایمنی بالایی دارند تا بتوانند نیاز شما را برطرف کنند. برای خرید ماشین کنترلی ابتدا شما باید تصمیم بگیرید که این محصول را برای کدام نوع از مسابقات شهری و یا خارج از شهر می خواهید، یا اینکه برای چه امری نیاز به یک ماشین کنترلی دارید. برای خرید ماشین کنترلی شما باید در نظر داشته باشید که قرار است بر روی سطح صاف و هموار از این ماشین استفاده نمایید یا قرار است رانندگی را بر روی جاده های پر دست انداز و ناهموار انجام دهید. در نهایت باید تمام این نکات را در نظر بگیرید و مطابق با آن برای قیمت ماشین کنترلی عمل کنید. از طرف دیگر اگر شما ماشینی برای بیرون از شهر می خواهید بنابراین شما باید در نظر داشته باشید که شما بر روی نا همواری ها خواهید بود و ممکن است با سرعت پرش بزنید و بنابرین قدرت کنترل و ایمنی ماشین باید بسیار بالا باشد، چرا که شما بر روی یک سطح صاف حرکت نمی کنید و مدام در حال بالا پایین شدن هستید. بهترین ماشین های کنترلی دارای باتری های قابل شارژ هستند، چرا که شما پس از هر بار استفاده می توانید آن هارا شارژ کنید. و در نهایت موجب صرفه جویی در وقت و هزینه های شما می شود. عمر باتری های ماشین کنترلی نقاط ضعف آن ها هستند بنابرین باتری نامناسب باعث آزردگی خریدار می شود و طول عمر کوتاهی دارد و این برای مسابقات بسیار بسیار مهم می باشد. چرا که باید در طول مسابقات ماشین کنترلی سالم باشد و زمان شارژ آن و طول عمر بسیار مساله مهمی می باشد. بسیاری از رانندگان مسابقات ماشین کنترلی از چندین باتری مختلف استفاده می کنند تا در زمان مسابقه دچار مشکل نشوند بنابرین شما باید بسیار به این نکته توجه داشته باشید در هنگام انتخاب ماشین کنترلی حتما این مسئله را یکی از عوامل اصلی مورد نظر خود عنوان کنید. برخی از ماشین های کنترلی در حد ابتدایی و بسیار ساده می باشند، در حالی که برخی از آن ها کنترل بسیار بالا و دقیق با قدرت 2.4 گیگاهرتز را ارائه می دهد. اگر بسیار نزدیک به هم رانندگی کنید و در یک مسیر باشید ممکن است اختلالاتی در کنترل آن ها پیش بیاید.
چه نوع ماشین کنترلی ای برای من مناسب است؟
این بستگی به نوع مسابقه ای که می خواهید در آن شرکت کنید دارد آیا شما برای مسابقات جاده ای نیاز به یک ماشین با سرعت بالا دارید؟ ایا قلب شما برای مسابقات جاده ای میزد و یا برعکس شما به مسابقات خارج از جاده علاقه دارید؟ آیا شما به ماشین مسابقه ای با دو چرخ علاقه دارید و یا به صورت پیچیده تر به چهار چرخ احتیاج دارید. همچنین مقیاس را فراموش نکنید ماشن کنترلی هر چه در مقیاس و اندازه بسیار بزرگتر باشد گران تر است. اما خود را خسته نکنید ما در اینجا به صورت اساسی ماشن کنترلی را به شما معرفی خواهیم کرد.
ماشین های مسابقه ای
اکثر ماشین های مسابقه ای برای مسابقات جاده ای ساخته شده اند چرا که دارای حداقل تعلیق می باشند. آن ها برای سرعت گرفتن و دور زدن ساخته شده اند و با نهایت سرعت میروند اگر شما به دنبال مسابقات جاده ای هستید این گونه ماشین ها بهترین انتخاب برای شما هستند.
کامیون های مسابقه ای
این کامیون های غول پیکر اوج لذت را به شما در حین مسابقات جاده ای می دهند می توان با آن ها در هر گونه مسابقه ای شرکت کرد. برای بیرون از جاده آن ها بسیار هیجان انگیز هستند. این ماشن ها میتوانند بدون اسیب دیدن ماشین های دیگر را خرد کنند.
تراگی و باگی های مسابقه ای
این ماشن کنترلی برای مسابقات در بیابان ها و یا سواحل شنی طراحی شده اند. با لاستیک های عریض و بزرگ بهترین انتخاب برای مسابقات در تپه ها و بیابان ها می باشند. با ترکیب یک ماشین مسابقه ای و یک کامیون مسابقه ای شما یک باگی تحویل می گیرید. باگی ها قدرت و سرعت بالایی دارند و هیجان زیادی در مسابقات به شما می دهند.
کامیونت های مسابقه ای
با محبوبیت این مدل از ماشین ها که بسیار تخصصی می باشند و دارای سرعت بسیار هستند مسابقات آن ها در حال افزایش می باشد و مسیر این ماشن کنترلی احتمالا ساده ترین و اسان ترین مسیر برای مسابقه نیست اما اگر به این چالش علاقه دارید و دوست دارید برای مسابقاتش شرکت کنید پس این ماشین را بخرید و این کار را انجام دهید و هیجانی تکرار نشدنی را تجربه کنید.
هیولاهای مسابقه ای
چرخ های غول پیکر و موتور قدرتمند و کنترل بالا از جمله ویژگی اصلی هیولاهای مسابقه ای هستند. این خودرو ها بهترین تپه نوردان و بالارونده ها و له کننده ها هستند. اگر شما زیاد به سرعت توجه ندارید و به دنبال قدرت هستید این ماشین ها انتخاب مناسبی برای شما خواهند بود.
صخره نورد
اگر می خواهید از هر مانعی رد شوید و از بین صخره ها و سنگ ها بگذرید. یک ماشین مسابقه ای صخره نورد برای شما مناسب است. برف و باران، شن و ماسه، یخ و اب، گل و حتی جهنم هیچ چیز این قاتلان را متوقف نمی کند. چیزی در طبیعت وجود ندارد که بتواند این ماشین را متوقف کند. اگر به دنبال یک سرگرمی و لذت هستید پس این ماشین بهترین انتخاب برای شماست تا هیجانی بی نظیر به شما بدهد.
کوادکوپتر مانند یک ماشین بسیار پیچیده بنظر می رسد و به نظر میرسد که تعمیر کردن ان بسیار سخت و دشوار می باشد و ساخت ان بسیار مشکل است. اما حقیقت این است که اگر شما با قطعات ان اشنایی داشته باشید متوجه می شوید که یک وسیله بسیار ساده می باشد. ساخت کوادکوپتر بسیار اسان می باشد و اگر شما قطعات را بشناسید و از دستورالعمل ان را دنبال کنید براحتی میتوانید ان را سر هم کنید و یا تعمیر کنید پس بیایید تا باهم این کار را انجام دهیم. چه چیزی یک کوادکوپتر را می سازد؟
اسکلت یا بدنه، شاسی
اسکلت یا شاسی کوادکوپتر مانند قابی می ماند که برخی از موتورها و پروانه ها متصل به شاسی می شوند. بیایید ابتدا به این قاب نگاه کنیم. شاسی های کوادکوپتر در اندازه های متفاوت وجود دارد و بر طبق وزن خود رتبه بندی می شوند. ان ها به شکل ایکس می باشند و کسانی که علاقه به نصب چیزی بر روی ان دارند مانند دوربین، پیشنهاد می کنیم تا موردی با وزن بیشتر را انتخاب کنند. چرا که وقتی شما دوربینی بر روی ان نصب کنید وزن بیشتر میشود پس شما باید موتور قوی تر که سنگین تر می باشد و پروانه های قوی تر بر روی ان ببندید. برای به خوبی پرواز کردن و مانور دادن باید تعادل بین اجزا حفظ شود.
موتور
احتمالا مهم ترین شاخص در کوادکوپتر موتور ان است. که واحد موتور KV می باشد که بر حسب تعداد هر دور در دقیقه است. اما با این حال همیشه سریعترین به معنای بهترین نمی باشد. هر چه سرعت بیشتر باشد و چرخش بیشتری انجام شود موتور باید بسیار قوی تر باشد و استفاده از باتری بیشتر می شود و بنابرین مدت زمان پرواز شما کاهش می یابد که این زیاد جالب به نظر نمی رسد.
پروانه و یا ملخ ها
پروانه ها عمدتا مربوط به سرعت این وسیله می باشند و همچنین باری که می توانند حمل کنند و مانوری که انجام دهند. برای هر کدام از این کارها طول پروانه ها باید به صورت درست و متناسب انتخاب شوند و همچنین انحنای پروانه بسیار مهم می باشد. پروانه های بلندتر در مدت زمان کمتری به سرعت بالایی می رسند اما کم کردن سرعت ان ها کمی طول می کشد و اما پروانه های کوتاه تر به شما امکان این را میدهند که هر چه سریع تر بتوانید سرعت خود را کم و یا زیاد بکنید و قابلیت مانور بهتری دارد. اما پروانه های کوتاه تر به انرژی بیشتری نیاز دارند بنابرین فشار بسیار بیشتری بر روی موتور می اورند که این ممکن است باعث کاهش طول عمر موتور شود و باتری هم بسیار مصرف می شود در این گونه از کوادکوپتر ها و این موجب میشود موتور به اندازه یک چهارم قابلیت و طول عمر خود دوام داشته باشد. اما اگر شما می خواهید در محیطی باز به صورت سرعتی و تهاجمی از ان استفاده کنید و بالا پایین ببرید بنابرین می توانید لذت ببرید.
کنترل سرعت الکترونیکی
تا کنون ما برخی از اجزای کوادکوپتر را مانند شاسی و موتور و پروانه را به شما معرفی کردیم اما قطعات این ماشین بیشتر از این هاست و کمی پیچیده تر می باشد و قطعه بعدی که کمی پیچیده تر است قطعه ای الکتریکی می باشد که به ان کنترل سرعت الکتریکی می گویند این کنترل یک جریان مناسب برای موتور فراهم می کند تاهمزمان چرخش و سایر حرکات انجام شود و انتقال قدرت به صورت یکسان و همزمان وارد شود. این قطعه باید از نظر استاندارد معتبر باشد اکثر انها برای موتورهای چندگانه طراحی شده اند این قطعات دارای مدارهایی هستند که باعث می شود کنترل کننده پرواز و اجزای دیگر گیرنده از ان مصرف کنند و به صورت مستقیم از باتری استفاده نکنند.
کنترل پرواز
حالا به یکی از قسمت های مهم یعنی به مغز کوادکوپتر می رسیم. کنترل کننده پرواز اساسا کامپیوتر کوچکی است که سیگنال های فرستنده را دریافت می کند و تفسیر می کند برای کسی که یک کوادکوپتر را انتخاب می کند کنترل کننده پرواز ان بسیار مهم می باشد چرا که این یک پردازنده می باشد که دارای قدرت و توان در محدوده های مختلف را دارد و از این جهت بسیار مهم می باشد هر کدام از این ها توانایی خاصی دارد و احتمال دارد قابل تنظیم هم باشد بنابرین کسی که کوادکوپتر خود را هدایت میکند نیاز به کنترلر مناسبی دارد تا بتواند پیامها و سیگنال های او را تفسیر کند البته باید در هنگام خرید قدرت و هزینه ان را در نظر گرفت تا از هر نظر مناسب و مقرون به صرفه باشد و مناسب با سایر قطعات کوادکوپتر شما باشد.
گیرنده رادیو
چگونه کنترل کننده پرواز سیگنال های فرستنده را از دور دور یا به عبارتی کنترل از راه دور را انجام می دهد؟ این کار از جمله وظایف رادیو گیرنده است. این یک قطعه ای است که به کنترل کننده پرواز متصل می شود برای دریافت سیگنال ها از راه دور و تفسیر ان ها به این قطعه نیاز دارید بسیاریب از گیرنده های رادیویی قابل استفاده برای این کنترل کننده ها می باشند که مطابق استاندارد های ان است. با این حال شما باید مطمئن شوید که متناسب با دستگاه شما می باشد و یا خیر و سپس ان را خریداری نمایید باید دارای چهار کانال باشد هر کانال برای دریافت سیگنالهای فرستنده، با این حال قبل از هزینه کردن بهترین را مطابق با سایر اجزا انتخاب نمایید تا متناسب با کوادکوپتر شما باشد و لذت استفاده ی بی عیب و نقص را به شما بدهد.
باتری و شارژر باتری
باتری لیپو
در نهایت برای قدرت بیشتر شما نیاز به یک منبع قدرت بسیار خوب دارید که معمولا یک باتری لیپو میتواند نیاز شما را برطرف نماید باتری لیپو دارای ظرفیت بسیار بالا می باشد و کاملا مناسب برای کوادکوپتر شما می باشد . همچنین شما در هنگام خرید کوادکوپتر خود یک شارژر مخصوص به خود ان را دریافت می کنید و بسیار مهم است که برای شارژ باتری فقط از شارژر خود ان استفاده کنید چرا که ولتاژ ان ها متفاوت است و اگر بیش از حد توان ان باشد می تواند حتی منجر به اتش سوزی نیز بشود. و همچنین قبل از این که باتری خود را به شارژر متصل کنید مطمئن شوید که باتری خنک شده باشد
97/5/15
12:0 ص

در صنعت هواپیمایی اختراعات قابل چشمگیری رخ داده است با ساخت انواع پهبادها و هلیشات ها و کواد کوپترها،میتوانیم به نجات بسیاری از انسان هاو فیلمبرداری های مهم و حساس و عبور از مکان های صعب العبور میتوان از این امکانات استفاده کرد و بهترین و زیباترین لحظات را ثبت کرد.با وجود چنین وسایلی میتوان به بشر بهنرین کمک ها رو بکنیم.از این ابزار به نحویی میتوان به امدادو نجات و فیلم برداری های هوایی و زمینی میتوان استفاده کرد.
کوادکوپتر در واقع همان هلیکوپتری است که چهار ملخ دارد. کوادکوپترها به دلیل طراحی خاصی که نسبت به هلیکوپترها دارند، پرواز پایدارتری داشته که آن ها را برای کارهای نظارتی و تصویر برداری هوایی مناسب می کند. به خصوص، از آن ها در تحقیقات UAV ( هواپیمای بدون سرنشین که برای جمع آوری اطلاعات و عکس برداری استفاده می شود unmanned aerial vehicle) طی سال های اخیر استفاده های زیادی شده است. کوادکوپترها در سایزهای متفاوتی ارائه می شوند. بعضی از آن ها ابعادی در حد یک CD دارند و بعضی دیگر پهنایی به اندازه ی یک متر دارند.
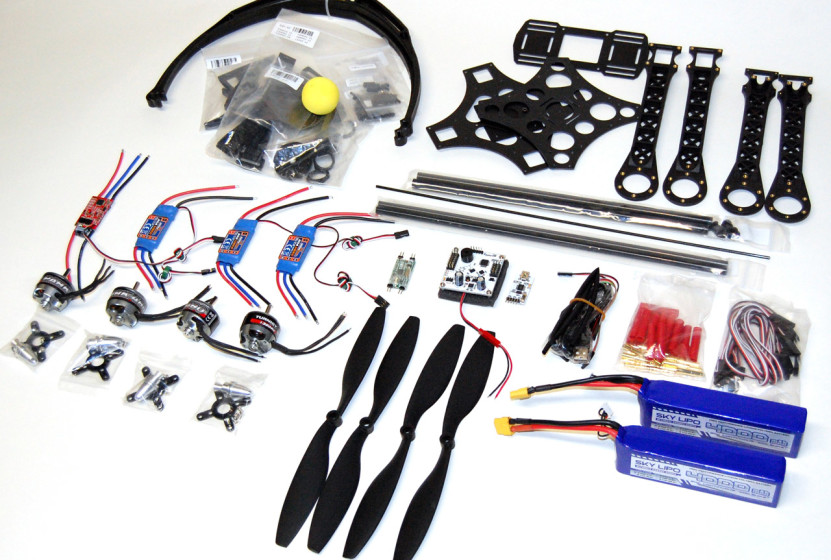
یک کواد کوپتر نیمه حرفه ای چگونه کار می کند ؟
در طراحی و ساخت کواد کوپتر ها از المان های متفاوتی استفاده میشود . توجه مهندسین به نحوه ی ساخت و تولید درست موجب می شود تا خروجی کار یک پرنده 4 موتوره ای باشد که میتوان برای مصارف گوناگون از آن بهره جست . در طراحی کواد کوپتر ها یک کیت اصلی وجود دارد که بر روی آن نصب می شود . وظیفه ی این کیت کنترل و هدایت پرواز از طریق چیپ ها و سنسور هایی است که در آن تعبیه شده است . مثلا سنسور قطب نما و شتاب سنج برای حفظ تعادل و تشخیص جهت پرنده نسبت به زمین در حین پرواز استفاده می شوند . کواد کوپتر دارای 4 ملخ می باشد که نحوه ی چینش آن ها بسیار مهم است . هر ملخ در خلاف جهت ملخ های کناری خود و هم جهت با ملخ روبرویی خود می چرخد .
هلیکوپتر دارای یک ملخ بزرگ است که تمام توان لازم برای بالا کشیدن هلیکوپتر را فراهم می کند. همچنین یک ملخ کوچک هم روی دم وجود درد که گشتاور ایرودینامیکی ناشی از ملخ بزرگ را خنثی می کند.(بدون ملخ کوچک، بدنه هلیکوپتر با سرعت ملخ بزرگ و در خلاف جهت چرخش آن به دور خودش خواهد چرخید)برخلاف هلیکوپتر، یک کوادکوپتر از چهار ملخ برای تولید نیروی بالابرنده استفاده می کند و هر ملخ یک چهارم وزن را تحمل میکند. بنابراین به موتورهای با قدرت کمتر و ارزان تر نیاز است. کنترل حرکت کوادکوپتر به وسیله تغییر دادن نیروی نسبی ناشی از هر ملخ به دست می آید.
چهار ملخ یک کوادکوپتر در رئوس یک مربع قرار داده شده اند که هر دو ملخی که در رئوس مقابل هم (به صورت قطری) قرار دارند در یک جهت می چرخند. یعنی دو ملخ در جهت عقربه های ساعت و دو ملخ در خلاف جهت عقربه های ساعت می چرخند. در واقع هر ملخ مخالف جهت ملخ همسایه ی خود می چرخد. اگر تمام ملخ ها در یک جهت بچرخند، حرکت کواد مانند هلیکوپتری است که روی دم خودش ملخ ندارد.
این دوران حول محور عمودی ناشی از عدم تعادل در گشتاور ایرودینامیکی است گشتاور ایرودینامیکی ناشی از جفت ملخ اول به وسیله گشتاور تولیدی توسط جفت ملخ دوم (که درخلاف جهت اولی می چرخند) خنثی می شود. حال اگر به جای کوادکوپتر یک مولتی کوپتر داشته باشیم، برای بدست آوردن تعادل و پرواز پایدار، باید به تعداد موتورهایی که در یک جهت می چرخند، موتورهایی که در خلاف جهت آن ها می چرخند نیز وجود داشته باشد.
برای کنترل تعادل کوادکوپتر باید به وسیله سنسورها اندازه گیری بی وقفه انجام شده و تنظیمات سرعت به ملخ ها اعمال شود. این تنظیمات به صورت اتوماتیک توسط یک سیستم کنترل برای حفظ تعادل کواد انجام می شود. یک کوادکوپتر تعدادی درجه آزادی (قابل کنترل) دارد که هر کدام از این درجه های آزادی به وسیله تنظیم نیروی تولیدی هر ملخ قابل کنترل است. پایداری و کنترل یک هواپیما که می تواند آزادانه در سه بعد حرکت کند نسبت به خودرو یا کشتی که فقط می توانند در دو بعد حرکت کنند بسیار پیچیده تر است. هر تغییر در یکی از جهت ها روی سایر جهت ها هم تاثیر خواهد گذاشت. مطابق شکل زیر، سه خط فرضی را تصور کنید که از یک هواپیما عبور کرده و نقطه برخورد آن ها در مرکز ثقل هواپیما است.
هواپیما می تواند حول هرکدام از این محورها چرخش کند. چرخش حول این محورها اساس کار جهت گیری هواپیما و حرکت به سمت مطلوب را شکل می دهد. اصطلاحات فنی این چرخش ها به شکل زیر است:
-چرخش حول محوری که ا زجلو به عقب هواپیما عبور کرده roll یا دوران حول محور طولی نام دارد.
-چرخش حول محوری که از کناره های هواپیما عبور کرده Pitch یا دوران حول محور عرضی نام دارد.
-چرخش حول محوری که به صورت عمودی از هواپیما عبور کرده yaw یا دوران حول محور عمودی نام دارد.
یک کواد کوپتر با افزایش سرعت و راندمان دو ملخ که در یک طرف هستند قادر است به صورت افقی یا عمودی بچرخد . مثلا اگر بخواهیم پرنده را به سمت راست بچرخانیم کافی است سرعت دو ملخی که در سمت چپ هستند را زیاد کنیم و به تبع آن سرعت چرخش دو ملخ در جهت مخالف کاهش می یابد . یا اگر بخواهیم کواد کوپتر را به سمت جلو هدایت کنیم سرعت ملخ های جلو را زیاد میکنیم و به تبع آن سرعت ملخ های عقب کاهش می یابد . در نتیجه این موضوع قابل استنباط است که به طور کل تمام تعادل و جهت حرکت کوادکوپتر با کم و زیاد شدن ملخها صورت میگیرد
کاربرد کوادکوپتر
کوادهای شخصی در سال های اخیر چه به عنوان وسیله ای برای سرگرمی و چه به عنوان وسیله ای برای خلق عکس های زیبا توسط عکاس های حرفه ای خیلی مورد توجه قرار گرفته اند. با پیشرفت تکنولوژی، کاربردهای تازه ای از کوادها در حال ظهور کردن است که در ادامه به بخشی از آن ها می پردازیم:
صنعت هواپیمایی
یکی از کاربردهای جالب کوادها استفاده در صنعت هواپیمایی است. البته وقتی هواپیما در آسمان یا باند فرود است به هیچ عنوان کوادها مسئله خوش آیندی نیستند چرا که امکان برخورد و صدمه دیدن هواپیما وجود دارد، اما می توان از کوادها به منظور بررسی و تشخیص عیب های ظاهری بدنه ی هواپیما که نقش مهمی در ایمنی پرواز دارد استفاده کرد. این کار در گذشته به وسیله ی مهندسان آموزش دیده انجام می شده است. اما اکنون تنها نیاز است که کواد به همراه یک دوربین HD به پرواز درآید و مهندس ناظر آن را کنترل کرده و تصاویر و فیلم های لازم را از بدنه هواپیما تهیه کند و سپس با بررسی فیلم ها و تصاویر، نقص های بدنه ی هواپیما را تشخیص دهد. در واقع در این کاربرد نیاز به حضور فیزیکی انسان حذف شده است.
مداد و نجات
از کوادها می توان در عملیات نجات و کمک به افرادی که دچار سوانح و بلایای طبیعی شده اند هم استفاده نمود. مثلا در شرایطی که افراد امداد رسان در حال جستجوی منطقه هستند می توان با به پرواز درآوردن کوادها و تهیه تصاویر و فیلم از منطقه ی تحت بررسی، نقاطی را که افراد مصدوم در آن جا قرار دارند شناسایی کرده و تیم امداد رسان را به آن جا هدایت نمود. هم چنین به عنوان کاربردی که در آینده می تواند مطرح شود استفاده از ربات های امداد رسان که با کوادها به صورت رادیویی لینک ارتباطی دارند می تواند کیفیت امداد رسانی را ارتقا بخشد.
معادن
در معادن نیز می توان کوادها را مورد استفاده قرار داد. چرا که برای تهیه تصاویر معدن جهت تشخیص نقاط خطرناک و حادثه خیز مانند دیواره های دارای درزه و ورودی معادن می تواند به کار آید. این بررسی ها می تواند در صورت ریزش دیواره های معدن خطرات جانی برای ناظران به همراه داشته باشد. همچنین در گذشته باید تصاویر هوایی با هلیکوپتر تهیه می شد که هزینه بالایی داشت. وجود کواد می تواند این هزیه را بسیار پایین آورد. در کل در کارهای نظارتی که برای کارکنان معدن می تواند خطرات جدی وجود داشته باشد، بهتر است نقش نظارتی به کوادها واگذار شود.
بعضی از شرکت های بزرک هم مانند Amazon و FedEX از کوادها برای تحویل محموله های خود در مناطق محلی استفاده کرده اند. هم چنین بعضی از پیتزا فروشی ها هم دست به چنین اقدامی زده اند.
چرخش کواد در ملخ ها باید چگونه بچرخند؟
در کواد کوپترها برای این که take-off و فرود نرمی داشته باشیم باید 4 موتور با سرعت یکسان به گردش درآیند. (فرض بر این است که وزن کواد کوپتر به صورت مساوری روی بدنه یا فریم قرار گرفته است).
متمایل شدن به چپ یا راست
برای متمایل شدن (یا چرخش) به راست یا چپ باید سرعت دو موتوری که در یک طرف هستند نسبت به سرعت دو موتوری که در طرف دیگر هستند افزایش پیدا کند. برای مثال اگر بخواهیم به سمت چپ متمایل شویم باید موتورهای سمت راست بدنه سریع تر بچرخند و موتورهای سمت چپ هم سرعت خود را کاهش بدهند. برای متمایل شدن به سمت راست باید خلاف حالتی که بیان شد اتفاق بی افتد، یعنی موتورهای سمت چپ باید افزایش سرعت داده و موتورهای سمت راست سرعت خود را کاهش دهند. به تصویر زیر دقت کنید.
متمایل شدن به جلو یا عقب
به همین ترتیب برای متمایل شدن به سمت جلو، دو موتور عقب باید سرعت را افزایش داده و موتورهای جلویی سرعت را کاهش بدهند. برای متمایل شدن به عقب باید معکوس این عملیات تکرار شود. یعنی دو موتور جلوی سرعت خود را افزایش داده و دو موتور عقبی سرعت خود را کاهش دهند.
چرخش به چپ یا راست حول محور عمودی
برای این که کواد به سمت چپ یا راست بچرخد باید دو موتور که به صورت قطری رو به روی هم هستند سرعت خود را افزایش دهند. برای چرخش ساعتگرد (به سمت راست) حول محور عمودی، باید دو موتوری که پاد ساعتگرد می چرخند افزایش سرعت پیدا کنند و دو موتور دیگر سرعت خود را کاهش دهند. هم چنین برای چرخش پادساعت گرد (به سمت چپ) حول محور عمودی، باید دو موتوری که ساعت گرد می چرخند افزایش سرعت داده و دو موتور دیگر سرعت خود را کاهش دهند.
افزایش یا کاهش ارتفاع
با چرخش هر کدام از ملخ های کواد نیرویی به سمت بالا به کواد وارد می شود که مجموع نیروی حاصل از چرخش چهار ملخ همان نیروی بالا برنده ی کواد است. نیروی گرانش هم که برابر با وزن کواد است به سمت پایین به آن وارد خواهد شد. حال اگر این دو نیرو برابر با هم باشند، هم دیگر را خنثی کرده و کواد در یک ارتفاع ثابت باقی می ماند. در صورت بیشتر بودن نیروی بالابرنده، ارتفاع کواد افزایش پیدا می کند و در صورت بیشتر بودن نیروی گرانش، ارتفاع کواد کاهش پیدا خواهد کرد.
حرکت افقی به جلو یا عقب
به منظور حرکت افقی کوادکوپتر رو به جلو باید موتورهای عقبی نسبت به موتورهای جلویی سریع تر بچرخند که باعث متمایل شدن کواد به جلو می شود. حال در این وضعیت اگر سرعت تمام موتورها به یک میزان افزایش یابد، کواد به سمت جلو حرکت خواهد کرد. برای حرکت به سمت عقب هم عکس این مطلب درست است. یعنی باید موتورهای جلویی سریع تر بچرخند و سپس سرعت تمام موتورهای به یک میزان افزایش پیدا کند.
در این حالت نیروی بالابرنده ی کواد دیگر عمودی نیست و مایل می شود پس دارای یک مولفه ی عمودی و یک مولفه ی افقی خواهد بود. مولفه ی عمودی بسته به این که از نیروی گرانش بیشتر، کمتر یا مساوی با آن باشد، به ترتیب سبب افزایش، کاهش و حفظ ارتفاع کواد می شود. اما مولفه افقی نیروی بالا برنده کواد را به سمت جلو هدایت می کند.
معرفی لوازم یدکی کوادکوپتر
حال که با کاربردها و اصول پرواز کواد آشنا شدیم بهتر است درباره اجزای آن هم اطلاعاتی بدست آوریم. یک کواد معمولا شامل قطعاتی مانند : فریم یا بدنه، موتور، ملخ، باتری، سنسورهای IMU، کنترل کننده پرواز، فرستنده و گیرنده می باشد.
فریم
بدنه یا فریم ساختاری است که قطعات روی آن نصب می شود و باید دارای استقامت کافی باشد تا بتواند لرزش های ناشی از چرخش موتورها را تا حد ممکن خنثی کند. بدنه کوادکوپتر از 2 یا 3 بخش تشکیل شده است که لزوما هم نباید از یک جنس باشند.
-صفحه مرکزی که بردهای الکترونیک روی آن قرار می گیرند.
-چهار بازوی اصلی که به صفحه ی مرکزی وصل می شوند.
-چهار چنگک یا نگه دارنده ی موتورها که به انتهای بازوها وصل می شوند.
جنس بدنه عمدتا از مواد زیر می باشد: فیبر کربن، الومینیوم، چوب مانند MDF
موتور
برای به پرواز درآوردن کوادها نیاز به موتورهایی پرسرعت است که با ولتاز DC کار می کنند و البته مشکلاتی مانند از بین رفتن جاروبک ها و جرقه زنی در آن ها وجود ندارد. به بیان دیگر عملکرد سریع، بی وقفه و صحیح موتورها جزء حیاتی ترین عوامل در پرواز کواد است. به همین دلیل بهترین گزینه استفاده از موتورهای براشلس است.
این موتورها از این لحاظ که برای چرخاندن شافت از سیم پیچ و آهنربا استفاده می کنند به موتورهای DC معمولی شبیه هستند، اما روی شافت خود هیچ جاروبکی که باعث تغییر جهت جریان سیم پیچ ها شود ندارند (به همین دلیل به آن ها brushless یا بدون جاروبک می گویند). در عوض در مرکز خود سه سیم پیچ دارند که ثابت شده اند، به این معنا که سیم ها مستقیما به آن ها متصل بوده و نیازی به جاروبک ندارند. در فضای اطراف سیم پیچ ها تعدادی آهن ربا درون محفظه یک استوانه که به شافت متصل است قرار گرفته اند.
موتورهای براشلس نسبت به موتورهای DC معمولی سریع تر می چرخند و در یک سرعت معین توان کمتری مصرف می کنند. این موتورها به این دلیل که در جاروبک ها توان تلف شده ای ندارند (چون اصلا جاروبک ندارند) مصرف انرژی بهینه تری داردند.
موتورهای براشلس در انواع مختلفی عرضه می شوند که از نظر سایز و مصرف جریان تفاوت دارند. در زمان انتخاب موتور باید وزن، سایز، اندازه ملخ یا پروانه مورد استفاده و در نهایت به میزان جریان مصرفی دقت کرد. در تصویر زیر یک نمونه موتور براشلس که مربوط به یک فلاپی گردان قدیمی است را مشاهده می کنید. استاتور این موتور همان سیم پیچ های مرکزی است که ثابت هستند و روتور هم که در شکل به صورت وارونه در سمت راست قرار گرفته دارای آهن ربای دائمی است. چرخش این موتورهای نیازمند برد الکترونیک مخصوصی است.
ESC
Electronic speed controller) ESC) یک برد الکترونیکی است که به موتور می گوید که با چه سرعتی بچرخد و برای هر موتور یک عدد نیاز است. هر کدام از ESC ها باید به صورت مستقیم یا از طریق برد توزیع کنند توان، به باتری متصل گردند. چرخش موتورها با سرعت بسیار دقیق به منظور پرواز پایدار اهمیت وجود ESC را نشان می دهد.
اغلب موتورهای براشلس دارای 3 فاز هستند، بنابراین منبع تغذیه DC برای چرخاندن آن ها مناسب نیست. راه حل استفاده از ESC است. ESC سه سیگنال فرکانس بالا با فاز متفاوت اما قابل کنترل را به طور پیوسته برای چرخش موتور تولید می کند و هم چنین می تواند با source کردن جریان کافی باعث شود تا موتور در صورت نیاز توان بیشتری مصرف کند. ESC یک برد کنترل موتور ارزان قیمت با یک ورودی باتری و یک خروجی 3 فاز برای موتور است. هر ESC به طور مستقل با یک سیگنال PPM (یا PWM) کنترل می شود. برای یک کوادکوپتر، کنترلر باید توانایی تولید فرکانس های تا حد امکان بالا را داشته باشد تا موتور بتواند به منظور پایداری بیشتر کواد، خیلی سریع تغییر سرعت دهد. برای مثال سیگنال PPM با 200 یا 300 هرتز مناسب است.
دوفاکتور مهم در انتخاب ESC نقش دارند:
توانایی source کردن جریان کافی که حداقل باید 10 آمپر باشد.
امکان تغییر فرکانس سیگنال در محدوده دلخواه و قابل تنظیم.
در شکل زیر یک نمونه ESC که توانایی source کردن 30 آمپر را دارد مشاهده می کنید.
کنترل کننده پرواز
هیچ انسانی قادر نیست تا با استفاده از قوانین فیزیک بیان شده جهت پرواز کواد، تعادل کواد را حفظ کرده و آن را به مقصد مورد نظر هدایت کند. این جاست که کنترل کننده های پرواز وارد بازی می شوند. در واقع برد کنترل کننده پرواز مغز کواد است. این برد بر اساس ورودی، سرعت موتورها را کنترل می کند. مثلا فرمان حرکت افقی که از طرف خلبان صادر می شود به برد کنترل کننده پرواز داده شده و این برد سرعت موتورها را متناسب با این دستور تنظیم می کند. همچنین برای پروازی دقیق تر نیاز است تا علاوه بر کنترل خلبان، کنترل های دیگر که ناشی از اندازه گیری سرعت، شتاب، جهت، موقعیت جغرافیایی و … است به کواد اعمال شود. در نتیجه سنسورهایی مانند شتاب سنج و ژیروسکوپ که برای تعیین سرعت موتورها به کار می روند در این قسمت قرار گرفته اند. قسمتی که مسئول اندازه گیری است، IMU یا واحد اندازه گیری داخلی نام دارد.
IMU یک سنسور الکترونیکی است که وظیفه اندازه گیری سرعت، جهت و نیروی گرانش کواد را بر عهده دارد. این اندازه گیری ها کمک می کند تا محاسبات لازم برای تغییر سرعت موتور ها انجام شود. IMU ترکیبی از یک شتاب سنج 3 محور و یک ژیروسکوپ (گردش نما) 3 محور می باشد. در برخی موارد از یک مغناطیس سنج 3 محور هم برای پایداری بیش تر محور عمودی استفاده می شود.
IMU چگونه کار می کند؟
شتاب سنج، نیرو و شتاب را اندازه گیری می کند، بنابراین گرانش به سمت پایین هم حس می شود. چون شتاب سنج، حس گرهای 3 محور دارد، در نتیجه جهت دستگاه را هم می تواند تشخیص دهد.
ژیروسکوپ سرعت زاویه ای را اندازه گیری خواهد کرد. به بیان دیگر سرعت گردش حول سه محور را به دست می آورد.
استفاده از شتاب سنج به تنهایی
اگر فقط از شتاب سنج استفاده شود می توان جهت را نسبت به سطح زمین به دست اورد. اما وقتی لرزش موتورهای زیاد باشد، شتاب سنج نمی تواند لرزش را از جهت تشخیص دهد و ناپایدار می شود. بنابراین برای حل این مشکل سراغ ژیروسکوپ می رویم. در نتیجه بین لرزش و حرکت واقعی تمایز قائل خواهیم شد.
استفاده از ژیروسکوپ به تنهایی
ژیروسکوپ معمولا دچار رانش یا drift می شود به این معنا که اگر شروع به چرخش سنسور کنیم، خروجی ژیروسکوپ سرعت زاویه ای خواهد بود اما در صورت متوقف کردن حرکت، مطمئن نیستیم که خروجی ژیروسکوپ هم صفر می شود. اگر تنها از ژیروسکوپ استفاده شود بعد از توقف هم چنان خروجی غیر صفر وجود خواهد داشت. به همین دلیل از شتاب سنج هم در کنار ان استفاده می شود.
تریم کردن کواد کوپتر چیست؟
اگر جز کاربران کوادکوپتر می باشید حتما این اصطلاح را تا به حال شنیده اید، که پرنده به تریم نیاز دارد ، یا پرواز کواد کوپتر شما تریم نیست!
تریم به معنای متوازن و دقیق پرواز کردن است و در معنای ساده تر به معنای حفظ تعادل و توازن پرنده هنگام پرواز میباشد.
زمانی که شما در حال هدایت یک مولتی روتور هستید ممکن است در حین هاور پرنده ، متوجه شوید که کوادکوپتر متمایل به راست ، چپ، جلو یا عقب است و تعادل کافی ندارد ، در این جا پرنده نیاز به تریم کردن دارد.
تریم کردن یک پرنده تنها در زمان پرواز مشخص میشود اما در حالت کلی ، کوادکوپترهایی که به تازگی کالیبراسیون شده اند نیازی به تریم نخواهند داشت. کواد کوپترها معمولا در اثر شرایط خاص جوی و یا وجود امواجهای شدید ماهواره ای ، ممکن است متوازن پرواز نکنند و در این زمان نیاز به تریم شدن دارند.
برای تریم کردن کواد کوپتر در حال پرواز و حفظ تعادل پروازی ، کافیست توسط ریموت کنترل تریم را انجام دهید. در اکثر کوادکوپترها به ویژه کوادکوپترهای سایما ، طریقه تریم کردن به ک شکل میباشد.
به طور کلی وقتی پرنده شما به یکی از سمتها متمایل است تنها کافیست با فشردن دکمه روی ریموت کنترل و با دادن دستوری خلاف جهت تمایل پرنده، مولتی روتور را تریم کرده و تعادل پروازی را به روال قبل برگردانیم
در کوادکوپترهای سری سایما بر ربوی ریموت کنترل 4 دکمه تعبیه شده است، با فشردن هرکدام و تکرار آن در چندین بار و با شنیدن صدای بوق پرنده، متوجه میشوید که عمل تریم انجام شده است.
به همین آسانی میتوانید پرنده خود را تریم کنید تا توازن پرواز در آن انجام پذیرد.
هلیشات
هلیشات از دو کلمه هلی (به معنای هلیکوپتر) و شات (به معنای عکاسی و تصویر برداری) تشکیل شده است ، به نوع جدیدی از تصویر برداری هوایی و از نگاهی نوین هلیشات گفته می شود.
در زمانهای دورتر برای تصویر برداری هوایی از هلیکوپترهای بزرگ استفاده می کردند به این ترتیب که یک پرنده مثل هواپیما یا هلیکوپتر با خلبان به همراه یک تیم تصویر برداری و دوربین بر فراز محیطی که قصد تصویر برداری داشتند پرواز کرده و اقدام به تصویر برداری می نمودند ، که طبیعتا این نوع از تصویر برداری هزینه های بسیار زیادی داشت که مقرون به صرفه نبود ، همچنین کیفیت مطلوب و مورد قبول نیز حاصل نمی شد ، در نتیجه در حال حاضر از این روش تصویر برداری هوایی یا هلیشات کمتر استفاده می کنند.
با پیدایش مولتی روتور ها رویای پرواز در محیطهای و فضاهای نا ممکن پدیدار گشت و با پیشرفت علم و ساخت انواع مولتی روتور و کوادکوپتر دریچه ای نوین به سوی تصویر برداری هوایی یا هلیشات گشوده شد.
امروزه از هلیشاتها در سطوح گسترده ای نظیر تصویر برداری صنعتی ، تصویر برداری هنری ، نقشه برداری و تصویر برداری در مناطق صعب العبور استفاده می کنند.
امروزه از هلیشاتها در سطوح گسترده ای نظیر تصویر برداری صنعتی ، تصویر برداری هنری ، نقشه برداری و تصویر برداری در مناطق صعب العبور استفاده می کنند.
علم پرواز با کوادکوپتر و عمود پروازها و روش پرواز با آنها یکی از ملزومات برای ورود به دنیای حرفه ای هلی شات می باشد ، در مرحله بعدی یک هلیشات کار حرفه ای باید دید تصویر برداری حرفه ای هم داشته باشد ، بنابراین تمرین و ممارست در یادگیری هلی شات بسیار مهم می باشد ، از همه مهمتر نحوه پرواز با یک مولتی روتور نیز بسیار مهم می باشد ، اگر میخواهید یک هلیشات کار حرفه ای شوید باید خلبان خوبی نیز باشید!


